Robô de soldagem MIG chinês de alta qualidade para soldagem de aço inoxidável.







Corpo de robô
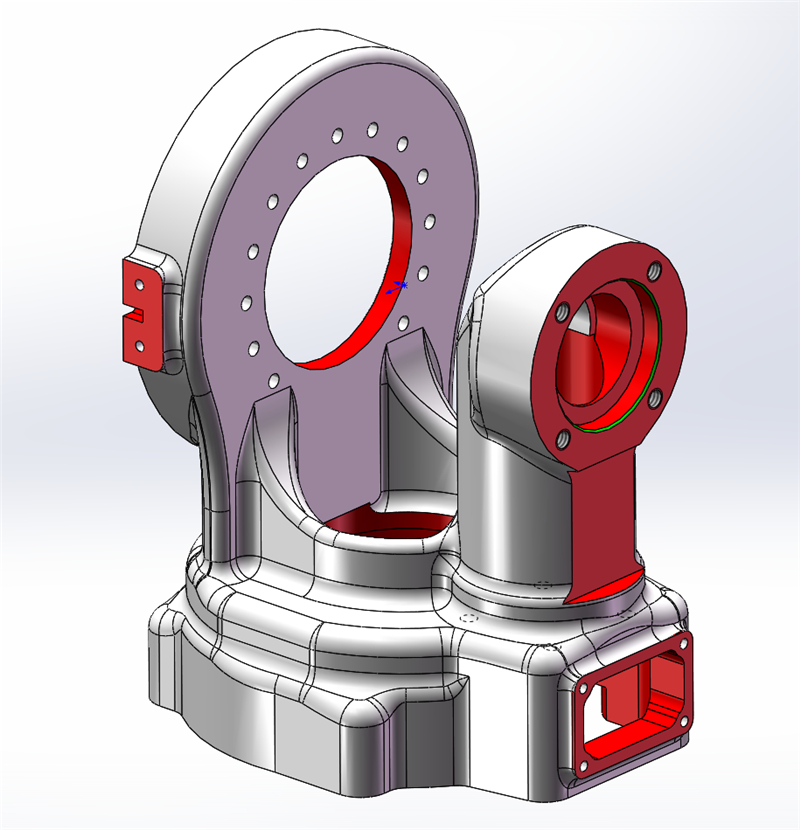
O robô JHY apresenta mudanças principalmente no processo de fundição e no design detalhado da sua estrutura. Nossa equipe de P&D realizou diversas inovações no design do corpo do robô, possuindo mais de dez novas patentes de invenção.
Por exemplo, o sexto eixo desenvolveu um mecanismo de transmissão de alta precisão e barras de reforço, e o disco de saída da sexta roda adota um design sem engrenagens, o que melhorou significativamente a precisão e a estabilidade do robô. Mesmo operando a tocha de soldagem em posições difíceis, o robô mantém a estabilidade e evita vibrações. Esse ponto foi confirmado por nossos clientes nacionais.
O corpo do robô é produzido por meio da tecnologia de fundição sob pressão, o que torna nossos robôs mais densos e leves. O antebraço pode ser mais estreito e mais longo, e a proporção entre o braço e o antebraço se aproxima da proporção áurea, permitindo movimentos mais flexíveis e rápidos.
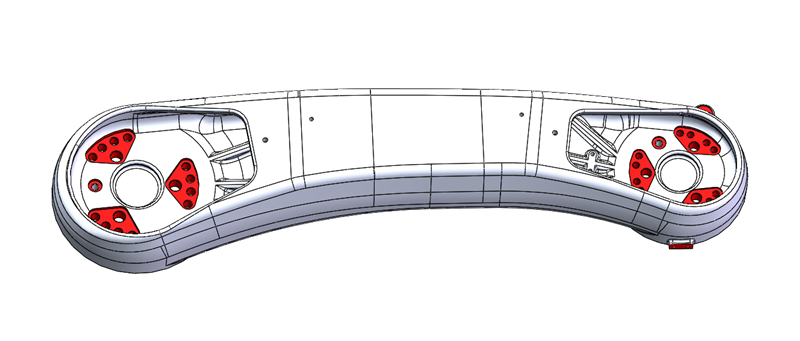
Desenho de contorno
O design reto do antebraço do robô é mais simples e elegante, com um senso estético mais apurado, alinhado ao mercado europeu. O design do corpo do robô já teve diversas patentes técnicas registradas, tornando o novo robô ainda mais perfeito.
Marca líder de fios
Os fios e terminais internos do robô são fabricados pelas principais marcas japonesas: DYEDEN, TAIYO, assim como ABB e Fanuc.
Terminal: marca italiana Yierma.
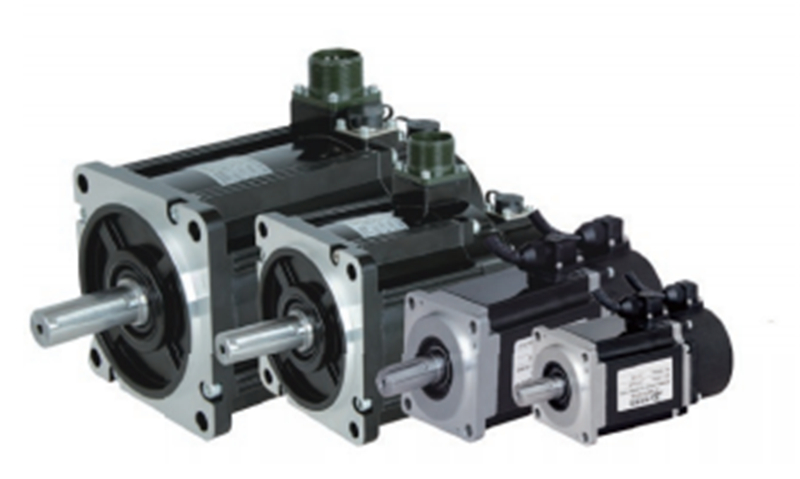
Principais marcas de servomotores/drivers/redutores
Todas elas adotam as principais marcas da China. Cada marca foi testada e investigada por um longo período antes da decisão final, para garantir que sejam adequadas para uso em nossos robôs e que sua qualidade e desempenho sejam estáveis e confiáveis.
Os eixos J1 e J2 adotam um design com três eixos excêntricos e torque de até 65 Nm, o que reduz o desgaste da engrenagem e aumenta a vida útil do redutor. Os redutores dos eixos J1 e J3 do robô JHY são atualmente os de configuração mais avançada na China.
Em relação ao servomotor, atualmente utilizamos motores de no máximo 3 kW para robôs.
Para robôs de 1,8 m e 2 m, a força motriz necessária para o 1º e o 2º eixos é maior, e os requisitos de potência do motor também são mais elevados.
Os motores de alta precisão e com múltiplas especificações atendem plenamente às demandas de aplicação do nosso robô.

3 anos/7500 horas sem necessidade de manutenção
A manutenção é simples e os próprios clientes podem operá-la facilmente.
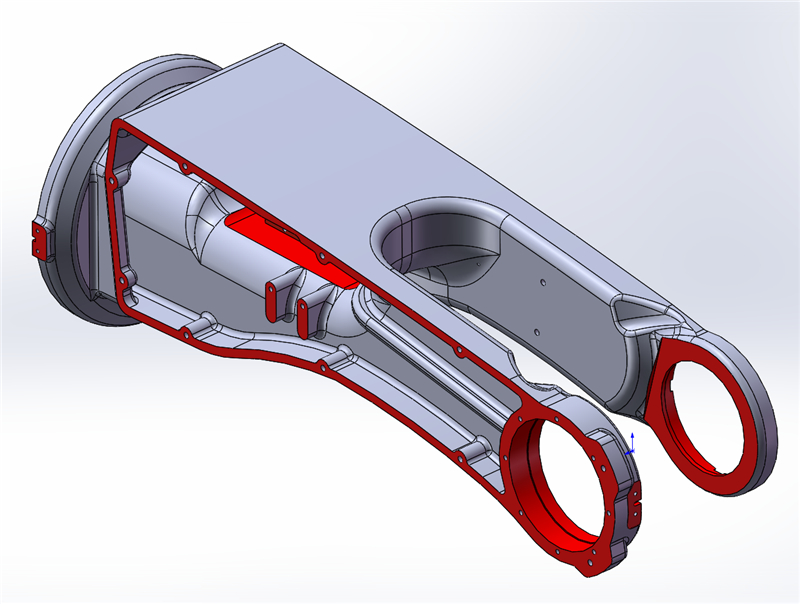
Outras patentes e desenhos
Transmissão secundária de 6 eixos: Alterada para duas conexões por correia, aumentando a relação de transmissão e solucionando o problema de movimento excessivo e impreciso do sexto eixo. O disco de saída do sexto eixo foi projetado sem engrenagens, com um mecanismo de transmissão de alta precisão, o que melhora a precisão de movimento do sexto eixo. Atualmente, possuímos mais de 30 patentes relacionadas ao robô de soldagem.
Vídeo
Parâmetros
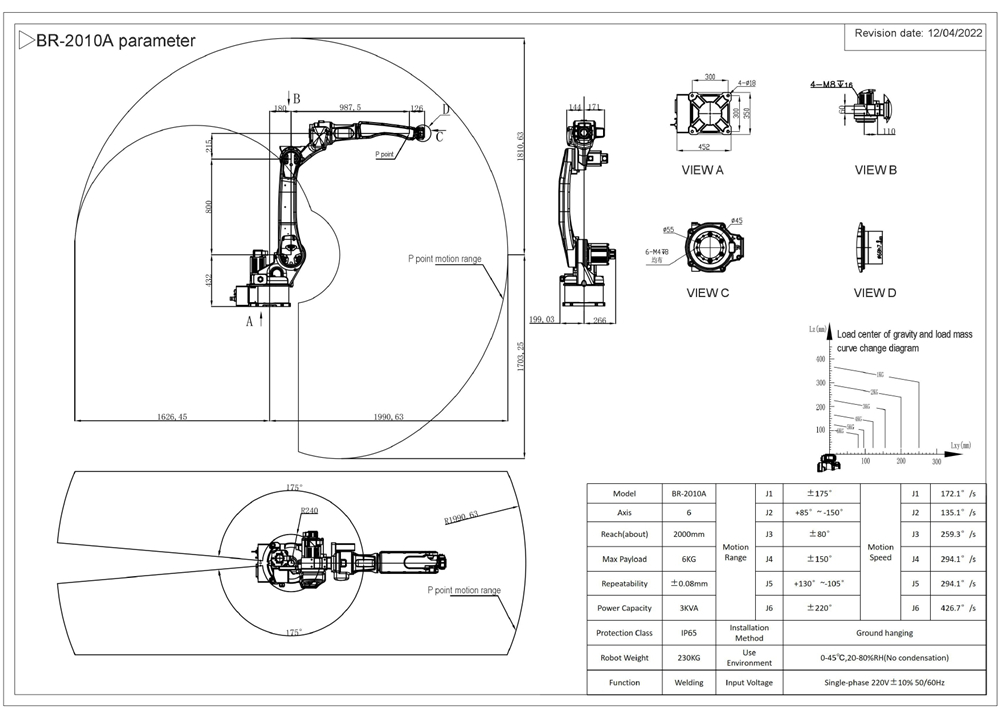
| Modelo | BR-2010A | amplitude de movimento | J1 | ±175° | Velocidade de movimento | J1 | 172,1°/s |
| Eixo | 6 | J2 | +85° ~ -150° | J2 | 135,1°/s | ||
| Alcance (aproximadamente) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Carga útil máxima | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Repetibilidade | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Capacidade de potência | 3KVA | J6 | ±220° | J6 | 426,7°/s | ||
| Classe de proteção | IP65 | Método de instalação | Suspenso no chão | ||||
| Peso do robô | 230 kg | Ambiente de uso | 0-45℃, 20-80% UR (Sem condensação) | ||||
| Função | Soldagem | Tensão de entrada | Monofásico 220V±10% 50/60Hz | ||||
Categorias de produtos
-

Robô de soldagem MIG de 6 eixos com baixo nível de respingos, alcance de 1800 mm
-

Robô de soldagem MIG/MAG de 6 eixos com alcance de 1500 mm...
-

Robô de soldagem de alta qualidade usado para soldar móveis.
-

Braço robótico industrial automático de 6 eixos JHY...
-

Robô de soldagem com alcance de 2000 mm para soldagem de carbono...
-

Robô de soldagem MIG com alcance de 2000 mm para aço inoxidável...